仿生机器人:一个力是好是坏?
在未来的反乌托邦版本,机器人横行和人类被迫的恐惧和furtiveness,向往的日子现场地下生活 - 今天,当我们仍然有选择的权力在我们自己的命运。
机器人领域,其中生物启发的设计中扮演着越来越大的部分,确实代表一个双刃剑在我们的社会,有能力为有好有坏。
在人工智能(IJCAI)上个月的2015年国际会议,1000多名机器人技术和人工智能研究者签署的生命研究所的未来提交给联合国的公开信。信中要求对武器化的AI的发展与能力,目标和杀灭没有意义的人为干预完全禁止。
这封信是由一些著名的公民,包括斯蒂芬·霍金和伊隆·马斯克,史蒂夫·沃兹尼亚克和诺姆·乔姆斯基签署。他们担心,在几年,而不是几十年,这样的设备可以变得司空见惯,以启动一个可怕的新的军备竞赛,把相对便宜批发查杀能力为任何人足够聪明的手来构建它。
这是机器人的阴暗面,以及谁是在外地工作的非常科学家看到一个迫切需要削减它。这些技术也提供了巨大的机会,以提高和改善生活,以及服用。在美国大学科研经费的世界,不幸的是,机器人的这两个方面往往纠缠。
无论是好是坏,机器人一直是仿生设计的一个主要应用场所。更多的有机器件在的,因为我们有能力处理信息进步的速度越来越快被开发,让事情变得更小,采用新材料具有新颖特性。
这种模式无疑将继续下去,它是整合机器和人机界面的大技术趋势的一部分。我们的机器会显得越来越逼真 - 也许,我们将看到越来越多像机(见证谷歌眼镜)。
当高科技模仿生活
寻求使机器更加逼真通常都是围绕着研究人员调查了生活的一些基本属性:适应性;强度而不的柔韧性或耐久性损失;自我修复;和自组织。
实际上可以进化或成长在生物学意义上的机器更是少之又少。之所以提出机器更逼真已经有少做他们融入文化,如机械宠物狗,比增加的功能和作用。
如果大象的鼻子是拾取和放置,如工程师更加得心应手费斯托研究,然后通过各种手段,让我们使用此表来操纵装配线上的零件。
有几个这样的功能驱动的创新最近被公之于众,他们提供的调查范围内的局部视图所追求。都对可持续发展的影响,因为所有可以提高效率,但其中一必威体育2018些可能会有真正的变革。
适应性生物体包括除其他事项外对外界刺激的响应,。通常,这种反应在一定程度上指的信息的处理。反馈回路此信息处理的一种形式。
一本教科书的例子是使用声纳的蝙蝠,因为它们寻找食物,快速变化的响应跟踪信号,它们的飞行路径。蝙蝠会发出从口或鼻高音调的声音,并接收回声在他们的耳朵。蝙蝠是比任何人为的声呐基阵更加高效,管理一个微小的,轻量级的飞行平台内的复杂过程。
弗吉尼亚理工大学的罗尔夫·穆勒花了他的大部分成年生活研究蝙蝠。他最着迷用于发送和接收的结构声纳信号 - 蝙蝠的所谓的鼻叶和耳朵。
这些结构具有复杂的形状,和穆勒和他的同事们推测,这两个挡板般的形状和结构的动态运动的关键是高性能。
使用高速摄像机,他们已经检测到扩音器样鼻叶都和耳朵这些运动。他们建立了这些结构的基本原型,并认为,这将导致对机器人导航更高效,更紧凑的传感器。
控制!
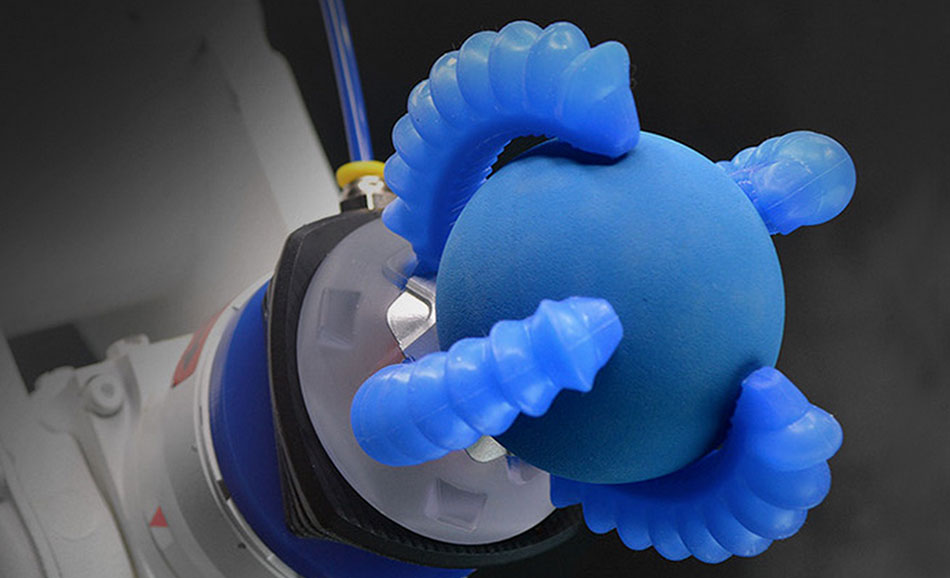
哈佛的乔治怀特赛德斯,同时,一直设计和建造softbots(或软体机器人)多年。他最近的贡献最大是海星灵感夹具,设想制造及自动化仓库使用。
海星是一个相对较小的数字建立在径向计划宏,多细胞生物中的一种,与附属物从一个中心点增长。海星使用在海水进出数百壶腹或泵送液压系统“脚”。每个壶腹的作用就像一个微小的火鸡涂油管,当水被抽出形成吸力。效果是通过许多脚非常有效地成倍增加。
人工原型从PDMS,或硅树脂制成,并且具有气动通道和充气单元的网络。当充气时的抓器的变化的整体形状,从尖端到中心卷曲。
这个动作模仿自然界中的许多现象,其中,材料本身的结构和性质创建一个动态变化。的开口松塔是其中交叉铺置的材料干燥以不同的速率和创建锥体,其允许种子掉出的尺度的卷曲的例子。
以这种方式设计动态设备往往进行了简化,避免了复杂的控制和驱动系统的需要 - 因而也常常使它们更便宜。这一发现有助于及时Whitesides的,以共同找到了一个商业化运作,软机器人,设计和制造行业的定制夹具。
材料问题
罗伯特·伍德,也是基于在哈佛,和他的同事那里,在加州大学圣地亚哥分校,已工作softbots那一跳。其中特别是通过从丁烷和氧气,而不是一个机械弹簧的燃烧动力。
该设备的自然灵感,然而,在其材料组合物,其中聚合物是在精确的层的3D印刷,以分级的材料从硬到软表达。
One of the best examples of this material variation in nature is found in the squid — a mollusk that manages to create one of the world’s hardest non-mineral substances in its beak, and yet transitions from this to its rubbery body by changing the ratio of proteins, sugars and water in its cells.
这种功能分级的已经允许一种耐久性,设备要求,因为它的土地,避免在软硬接口创建典型的应力点。
克莱姆森大学和他的同事们在俄勒冈州立大学的迈克尔·波特也看向海马为灵感的关节臂表示软硬机器人结构之间的中点。像更常见的动物秤或板,海马尾具有排列一起在一个灵活的系统,从而解决了矛盾需求既结实而柔韧硬各个单元。
海马尾具有相当刚性的,正方形棱柱帧是能够承受破碎内的内部接头。因为关节,尾部是高度灵活的,并且可以膨胀和收缩,因为每个四块板构成经过彼此的截面滑动的。
斯坦福大学和Stickybot成名的马克Cutkosky - 即壁虎启发机器人可能爬上玻璃 - 也已经成功地展示了衍生人类攀登系统。
最近,Cutosky一直在调查的基础上范德华力干燥粘结剂的新应用程序:在垂直表面上着陆微型飞行器(微型飞行器)。他正在完善一种机制来施加和释放车辆的人工脚,应用刚够剪切力和表面积达到的效果。
是否改善的信息的流动,或材料的性能,或功能的范围内,研究人员正在把到机器人的世界一个以上的有机特性。
虽然这种进步是巨大的,活细胞为基础的系统和这些人造模型的复杂之间的巨大鸿沟仍然是海洋。
在承认这种鸿沟,伍德最近描述了一个机器人研究所威斯播客作为寻找权力和执行过程简洁工作。
“如果我有肌肉和脂肪(用工作)相当于,我们可以构建任何东西,”他说。
让我们希望,我们必须使用这些奇妙的发明,促进生命,而不是把它的智慧。
更多关于这个话题





