仿生机器人:是善还是恶的力量?
在我们的未来的反乌托邦版本中,机器人横行霸道,人类被迫生活在恐惧和鬼鬼祟祟的地下,渴望着今天的日子,那时我们仍然有权选择自己的命运。
仿生设计在机器人领域发挥着越来越大的作用,它确实代表了我们社会中的一把双刃剑,它可以带来好处也可以带来坏处。
在上个月举行的2015年国际人工智能会议(IJCAI)上,1000多名机器人和人工智能研究人员签署了一封公开信,由未来生命研究所提交给联合国。这封信呼吁全面禁止开发能够在没有人为干预的情况下瞄准和杀人的武器化人工智能。
这封信由一些知名人士签署,包括斯蒂芬·霍金和埃隆·马斯克、史蒂夫·沃兹尼亚克和诺姆·乔姆斯基。他们担心,在几年内,而不是几十年内,这种装置可能变得如此普遍,从而引发一场可怕的新军备竞赛,将相对廉价的大规模杀伤能力交给任何足够聪明的人来制造。
这是机器人技术的阴暗面,而正是在这一领域工作的科学家们看到了削减它的迫切需要。这些技术也提供了一个巨大的机会来提高和改善生活,以及抓住它。不幸的是,在美国大学研究经费的世界里,机器人技术的这两个方面往往会纠缠在一起。
无论是好是坏,机器人技术一直是生物灵感设计的主要应用场所。由于我们处理信息的能力的进步,使事物更小和使用具有新特性的新材料,越来越多的有机设备正在以不断增长的速度被开发。
毫无疑问,这种模式将继续下去,它是集成机器和人机界面的更大技术趋势的一部分。我们的机器将看起来越来越逼真——也许,我们会越来越像机器(谷歌眼镜就是明证)。
当科技模仿生活时
使机器更逼真的探索通常围绕着研究人员调查生物的一些一般属性:适应性;不丧失弹性或耐久性的强度;自我修复;和自组织。
能够在生物学意义上进化或成长的机器就少得多了。使机器更逼真的原因与它们融入文化(如机械宠物狗)无关,而是与增强的功能和功能有关。
如果象的鼻子更便于挑选和放置,就像费斯托研究,那么无论如何,让我们用这个表格来操纵装配线上的零件。
最近公布了几项此类功能驱动的创新,并对正在进行的调查范围提供了部分看法。所有这些都对可持续性有影响,因为所有这些都可能提高效率,但有些可能被证明是真正的变革。必威体育2018
生物体的适应性包括对外界刺激的反应等。通常,这种反应意味着某种程度上的信息处理。反馈回路是这种信息处理的一种形式。
教科书上的一个例子是蝙蝠在捕食时使用声纳,根据跟踪信号快速改变飞行路径。蝙蝠会从嘴或鼻子发出高音,并在耳朵中接收回声。蝙蝠比任何人造声纳阵列都更高效,在一个小巧轻便的飞行平台内管理复杂的过程。
弗吉尼亚理工大学的罗尔夫·穆勒(Rolf Mueller)度过了他成年后的大部分时间研究蝙蝠. 他最着迷于用来发送和接收声纳信号的结构——蝙蝠的所谓鼻叶和耳朵。
这些结构具有复杂的形状,Mueller和他的同事认为,挡板状的形状和结构的动态运动是高性能的关键。
利用高速摄像机,他们在像扩音器一样的鼻叶和耳朵中都探测到了这些运动。他们已经建立了这些结构的基本原型,并相信这将导致一个更高效和紧凑的传感器用于机器人导航。
控制!
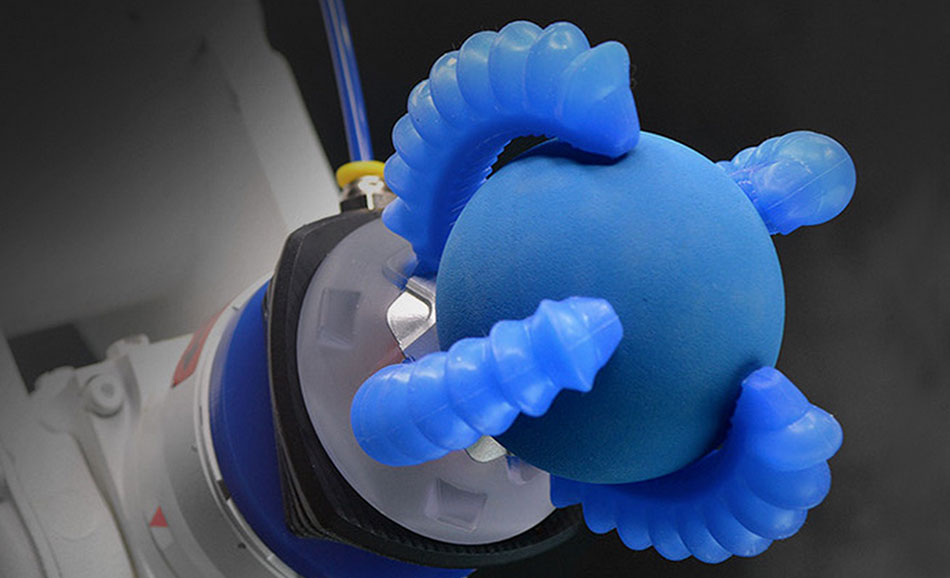
与此同时,哈佛大学的乔治·怀特塞兹(George Whitesides)一直在设计和构建软件机器人(或软体机器人)。他最近的贡献是一个海星启发的抓手,设想用于制造业和自动化仓库使用。
海星是在放射状平面上建造的数量相对较少的大型多细胞生物之一,其附属物从一个中心点生长。海星使用液压系统,海水被泵入和泵出数百个壶腹或“英尺”。每个壶腹都像一个小火鸡鲈鱼,当水被抽出时形成吸力。效果非常有效地通过许多英尺倍增。
人造原型由聚二甲基硅氧烷(PDMS)或硅酮制成,由气动通道和充气细胞组成。充气后,夹持器的整体形状会发生变化,从尖端向中心卷曲。
这种行为模拟了自然界中的许多现象,在这些现象中,材料本身的结构和特性产生了动态变化。松果的开口就是一个例子,在松果中,交叉放置的材料以不同的速度干燥,从而造成松果鳞片的卷曲,使得种子得以脱落。
以这种方式设计动态设备通常会简化它们,从而省去了复杂控制和驱动系统的需要——因此也常常使它们更便宜。这一发现促使Whitesides共同成立了一家商业公司,柔软的机器人,为工业设计和制造定制夹具。
材料问题
同样在哈佛工作的罗伯特·j·伍德(Robert J. Wood)和他在哈佛和加州大学圣地亚哥分校(University of California, San Diego)的同事一直在研究在软机器人上工作那一跳。其中一个特别是由丁烷和氧气燃烧提供动力,而不是机械弹簧。
然而,该设备的自然灵感表现在其材料组成上,其中聚合物以精确的层进行3D打印,以便将材料从硬到软进行分级。
自然界中这种物质变化的最好例子之一是鱿鱼。鱿鱼是一种软体动物,能够在其喙中制造出世界上最硬的非矿物质物质之一,但通过改变细胞中蛋白质、糖和水的比例,从这种物质过渡到其橡胶般的身体。
这种功能分级允许设备在着陆时需要的耐久性,避免了在硬和软界面上产生的典型应力点。
克莱姆森大学(Clemson University)的迈克尔·波特(Michael Porter)和他在俄勒冈州州立大学(Oregon State University)的同事们也将海马视为机器人关节臂的灵感来源,该关节臂代表了硬机器人结构和软机器人结构之间的中点。像更常见的动物鳞片或盘子一样,海马尾巴有坚硬的个体单元,它们排列在一个灵活的系统中,从而解决了既强壮又灵活的矛盾需求。
海马尾部的内部关节在一个相当坚硬的方形棱镜框架内,能够承受压碎。由于有了关节,尾部非常灵活,当构成横截面的四个板块相互滑动时,尾部可以伸缩。
斯坦福大学的马克·库特科斯基和Stickybot的名声仿壁虎机器人它还成功地展示了一种衍生的人类攀爬系统。
最近,Cutosky正在研究一种基于范德华力的干胶粘剂的新应用:微型飞行器(MAVs)在垂直表面上的着陆。他正在完善一种机制,应用和释放车辆的人造脚,施加足够的剪切力和表面积来达到这个效果。
无论是改善信息流,还是材料性能,还是功能范围,研究人员都在为机器人世界带来更有机的特性。
尽管这些进步是巨大的,但基于活细胞的系统的复杂性与这些人工模型之间的巨大鸿沟仍然是巨大的。
在承认这一鸿沟的同时,伍德最近在Wyss Institute的播客中简洁地将他的机器人工作描述为寻找动力和执行器。
“如果我有等量的肌肉和脂肪,我们就能造出任何东西,”他说。
让我们希望我们有智慧使用这些奇妙的发明来促进生活,而不是接受它。
关于这个话题的更多信息





